Diffusion模型介绍
Diffusion模型介绍
Diffusion扩散模型:AI是怎么把东西生成出来的?
摘要:Diffusion模型(扩散模型)是近年来深度学习领域最重要的突破之一,它在图像生成、视频生成、多模态生成等领域展现出了惊人的能力。本文将从概念入手,通过生动的例子和详细的数学推导,带你全面理解Diffusion模型的工作原理、训练机制以及前沿应用。
一、🚀 Diffusion模型概念速览
1.1 什么是Diffusion模型?
Diffusion,中文译为"扩散模型",是一种基于概率论的深度生成模型。其核心思想源自物理学中的扩散过程——就像一滴墨水在水中逐渐扩散,最终均匀分布在整个容器中。Diffusion模型正是模拟了这个过程的"逆过程":从混沌无序的噪声中,逐步恢复出有序、清晰的数据(如图片、文本、语音等)。
Diffusion扩散模型的核心思路可以概括为"先破坏,后重建":
- 破坏阶段(前向扩散):将真实数据逐步添加噪声,最终变成纯噪声
- 重建阶段(反向去噪):从纯噪声出发,逐步去除噪声,恢复出真实数据
这种看似"多此一举"的设计实际上蕴含着深刻的数学智慧:通过学习如何"逆转"一个已知且可控的噪声过程,模型获得了强大的生成能力。
1.2 Diffusion是一种隐式自回归(Implicit Autoregressive)
💡 关键洞察:Diffusion模型的生成过程本质上是一种**隐式自回归(Implicit Autoregressive)**过程。
Diffusion是它是逐步、多轮次的生成:![[一直更可爱的小猫咪~]](/data/posts/img/images/2.png)
为什么这样设计? 虽然Diffusion需要多步生成,但它解决了GAN训练不稳定、VAE生成模糊的核心问题。而且通过DDIM等技术,可以将多步压缩到10-50步,实际应用完全可以接受。
1.2 用生成一只"猫"来理解Diffusion模型
让我们通过一个具体的例子——生成一张猫的图片——来理解Diffusion模型的工作流程:
![[一只可爱的小猫咪~]](/data/posts/img/images/1.png)
流程详解:
| 阶段 | 过程 | 目标猫图片的状态变化 |
|---|---|---|
| 前向过程 | 逐步加噪 | 从清晰的猫 → 逐渐模糊 → 最终变成纯噪声 |
| 反向过程 | 逐步去噪 | 从纯噪声 → 逐渐清晰 → 最终生成清晰的猫 |
为什么模型能学会"去噪"? 关键在于:前向过程的每一步我们都精确知道噪声是如何添加的(数学公式已知),因此在训练时,我们可以精确控制任意时间步 的输入 ,然后让模型学习预测被添加的噪声 。这样,当模型学会了这个逆过程后,给定任意带噪图片,它都能"猜出"原始图片的模样。
一个神秘的mc小视频演示
作为MC建筑党我真的感觉AI很厉害!
二、🔬 Diffusion模型神秘的原理
用Diffusion模型的图像生成来讲把
影像生成共同的目标是什么?![[一只可爱小猫咪和一只诡异的小猫咪]](/data/posts/img/images/956e845d3823d6f9739338bc22790432.jpg)
用DDPM来介绍一下
2.1 核心只有两个
Diffusion模型的核心数学框架可以形式化为两个马尔可夫链[^1]:
flowchart LR
accTitle: Diffusion模型的两个核心过程
accDescr: 前向过程q和反向过程p的核心数学定义
subgraph Forward_Process["前向过程 (Forward Process) q"]
direction TB
q0["输入: 真实图片 x₀"]
q1["逐步添加噪声
q(xₜ|xₜ₋₁)"]
q2["输出: 纯噪声 x_T"]
q0 --> q1 --> q2
end
subgraph Reverse_Process["反向过程 (Reverse Process) pθ"]
direction TB
r0["输入: 纯噪声 x_T"]
r1["逐步去除噪声
pθ(xₜ₋₁|xₜ)"]
r2["输出: 生成图片 x₀"]
r0 --> r1 --> r2
end
Forward_Process --> Reverse_Process
style Forward_Process fill:#fff0f0,stroke:#ff6666
style Reverse_Process fill:#f0fff0,stroke:#66cc66
2.2 前向扩散过程详解(Forward Process)
前向过程 是不可学的,它负责将真实数据 逐步转换为噪声。
2.2.1 单步扩散公式
每一步的条件概率分布定义为:
2.2.2 直观理解
当 很小时(如0.0001), 几乎等于 ,只添加一点点噪声。
当 逐渐增大(如0.02), 中原始信息越来越少,噪声越来越多。
经过 步后,由于 , 完全变成了纯噪声 。
2.2.3 关键性质——重参数化技巧
由于逐步采样 次太慢,我们可以直接计算任意时刻 的噪声状态,而不需要一步步模拟:
其中:
- (累积乘积)
💡重参数化技巧的核心意义是大幅加速训练。想象你要从北京走到上海,原始做法是走一步看一眼前面的人怎么走的(逐步模拟);但有了重参数化,你可以直接算出来"我现在离北京有多远",从而一步到位知道自己在哪。训练时我们不需要真的跑1000步加噪,直接用公式一次算出任意时刻的 ,这让训练从不可行变成了可行。
flowchart LR
accTitle: 前向扩散过程中的参数关系
accDescr: 展示了α、β和均值、方差之间的关系
beta["βₜ: 噪声系数
随t递增"]
alpha["αₜ = 1 - βₜ"]
alpha_bar["ᾱₜ = ∏αᵢ (累积产品)"]
mean["均值 = √ᾱₜ · x₀"]
var["方差 = 1 - ᾱₜ"]
beta --> alpha --> alpha_bar --> mean
beta --> var
style beta fill:#ffcccc
style alpha_bar fill:#ccffcc
style mean fill:#cce5ff
style var fill:#ffffcc
重参数化技巧的直观理解:在 的情况下,如果要模拟前向过程,需要执行1000次噪声添加,这太慢了。但通过数学推导,我们可以直接计算出任意时间步 的 是什么。这大大加速了训练过程,因为训练时我们只需要一次计算就能得到任意 时刻的 。
2.3 反向去噪过程详解(Reverse Process)
反向过程 是可学习的,它从纯噪声 开始,逐步恢复出真实数据:
条件概率分布定义为:
2.3.1 核心思想:预测噪声而非预测原图
训练一个神经网络 来预测噪声 。
为什么预测噪声而不是直接预测原图? 这是一个精妙的设计。如果我们让模型直接预测 ,模型需要"凭空想象"出一张完整的猫图片,这非常困难。但如果我们让模型预测"被添加了多少噪声",模型只需要理解"当前图片中有多少是噪声"——这个任务简单得多,而且有明确的方向性。
2.3.2 均值参数的数学推导
通过贝叶斯定理,我们可以精确推导出反向过程均值 与噪声预测 之间的关系。
设 已知,则 的后验分布为:
其中后验均值为:
利用重参数化关系 ,可以进一步推导得:
因此,DDPM的训练目标可以转化为:让神经网络预测的 尽可能接近真实的 。
2.4 目标函数的推导
2.4.1 从ELBO到简化目标
严格的Diffusion模型训练应该最大化边际对数似然 ,这等价于最小化变分下界(ELBO)。
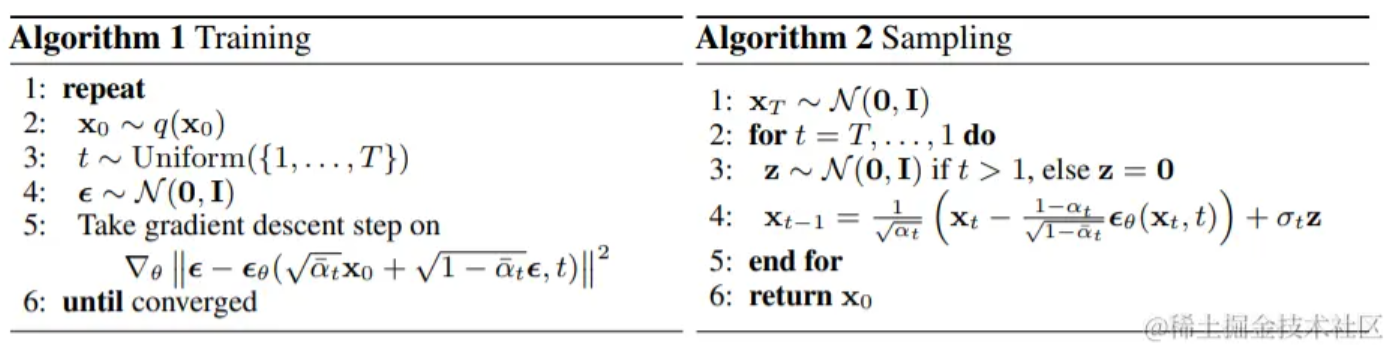
经过一系列数学推导(涉及KL散度、重参数化等技巧),最终可以简化为:
💡 这个公式说的是"让AI学会从噪声里把原始信号捞出来"。你可以把它想象成一个盲猜游戏——你听到了嘈杂音乐中混入的噪音,让你猜原始音乐长什么样。Diffusion的训练就是让神经网络反复做这个猜猜看的游戏,直到它能从任何程度的噪声中准确还原出原始内容。
这个目标函数简洁而优雅:给定带噪图片 ,让模型预测被添加的噪声 ,最小化预测值与真实值之间的均方误差。
2.4.2 损失函数的物理意义
这个损失函数的物理意义非常清晰:
- 神经网络需要从带噪样本 中预测出被添加的噪声成分
- 通过最小化预测噪声与真实噪声之间的均方误差
- 模型逐渐学会如何从噪声中恢复出原始数据
2.5 为什么反向过程要用噪声?
这是理解Diffusion模型的关键问题之一。在采样算法和输出时加入噪声有以下三个重要原因:
2.5.1 训练-推理一致性
flowchart LR
accTitle: 训练与推理的一致性
accDescr: 解释为什么在输出时要加入噪声以保持训练和推理的一致性
subgraph Training["📚 训练阶段"]
T1["x̃ₜ = √ᾱₜ·x₀ + √(1-ᾱₜ)·ε"]
T2["预测噪声 εθ"]
T3["Loss = ||ε - εθ||²"]
T1 --> T2 --> T3
end
subgraph Sampling["🎯 采样阶段"]
S1["xₜ 是前向过程产生的"]
S2["预测噪声 εθ(xₜ,t)"]
S3["xₜ₋₁ = f(xₜ, εθ)"]
S1 --> S2 --> S3
end
Training -->|"数学形式一致
保证分布匹配"| Sampling
style Training fill:#e6f3ff
style Sampling fill:#fff0e6
核心原因:训练时我们是从 出发加噪得到 ,推理时也是从纯噪声(等价于 步后的 )出发进行去噪。只有两边使用的数学形式一致,模型才能学会正确的去噪映射。
2.5.2 缓解误差累积
在逐步去噪的过程中,每一步都会有微小的预测误差。如果没有噪声的"润滑"作用,这些误差会像滚雪球一样越来越大,最终导致生成质量严重下降。
其中 就是额外加入的噪声。
2.5.3 温度采样(Temperature Sampling)
在某些应用场景(如引导生成),可以在采样时适当增加噪声强度:
这可以帮助平衡生成多样性和质量之间的关系。
三、🌐 Diffusion模型的应用领域简述
本节简要介绍Diffusion模型在语音和文本生成领域的应用,帮助读者了解模型的广泛应用场景。
3.1 语音生成领域
Diffusion模型在语音合成(Text-to-Speech, TTS)和音频生成领域展现出独特优势。与传统自回归模型相比,Diffusion模型能够更好地捕捉语音信号的全局分布,生成更加自然流畅的音频。
这里有一张示例图![[SHILITU]](/data/posts/img/images/v2-f301d97b030f027f3c42b1ccf7d4538e_1440w.jpg)
3.2 文本生成领域
Diffusion模型在文本生成领域也展现出巨大潜力[^3],
不过,众所周知,我们肯定是不能直接给文本加噪音的。那么怎么做?
四、💡 引导生成技术
4.1 什么是引导生成?
到目前为止,我们讨论的Diffusion模型都是无条件生成——从纯噪声开始,生成任意符合训练分布的样本。但在实际应用中,我们往往需要条件生成:根据文本描述生成图片,根据音素序列生成语音等。
**引导生成(Guided Generation)**就是解决这个问题的技术,它允许我们控制Diffusion模型的生成方向。
4.2 Classifier-Free Guidance
Classifier-Free Guidance(CFG,无分类器引导)是最常用的引导技术之一。其核心思想是联合训练条件和非条件模型,然后在推理时通过线性组合实现引导:
其中 是引导强度参数:
flowchart LR
accTitle: Guidance Scale对生成的影响
accDescr: 展示了不同guidance强度下的生成效果
w1["w = 0
无条件生成
多样但可能跑题"]
w3["w = 3-5
适中引导
平衡质量与多样性"]
w7["w = 7-10
强引导
高度忠实但可能缺乏创意"]
w1 --> w3 --> w7
style w1 fill:#ffcccc
style w3 fill:#ccffcc
style w7 fill:#cce5ff
| 值 | 效果 |
|---|---|
| 完全退化为无条件生成 | |
| 增强条件约束,生成更符合条件的结果 | |
| 越大 | 生成结果越"忠实"于条件,但可能失去多样性 |
为什么叫"无分类器"引导? 传统的Classifier Guidance需要单独训练一个噪声条件下的分类器,并利用其梯度引导生成。CFG的创新之处在于"不需要额外分类器"——它直接通过模型自身的条件和非条件输出来实现引导,大大简化了训练流程。
五、📝 总结回顾
5.1 核心要点
| 层次 | 内容 | 一句话概括 |
|---|---|---|
| 概念层 | 前向扩散 → 反向去噪 | 先破坏后重建,从噪声中还原数据 |
| 数学层 | 马尔可夫链 + 重参数化 + ELBO简化 | 用数学工具把"不可学"变成"可学" |
| 训练层 | 噪声预测损失 | 教AI从噪声中"猜"出原始信号 |
| 架构层 | U-Net + Time Embedding | 让网络知道"现在噪声多还是少" |
5.2 给一张表格
| 模型 | 生成方式 | 优点 | 缺点 |
|---|---|---|---|
| Diffusion | 隐式自回归(多步去噪) | 训练稳定、生成质量高、多样性好 | 生成速度慢(可通过DDIM加速) |
5.3 给一张流程图
flowchart TB
subgraph Training["训练阶段"]
T1["真实图片 x₀"] --> T2["前向加噪
xₜ = √ᾱₜx₀ + √(1-ᾱₜ)ε"]
T2 --> T3["U-Net预测噪声 εθ"]
T3 --> T4["Loss = ||ε - εθ||²"]
end
subgraph Sampling["采样阶段"]
S1["纯噪声 x_T"] --> S2["U-Net预测噪声 εθ"]
S2 --> S3["去噪得到 x_{T-1}"]
S3 --> S4{"t > 1?"}
S4 -->|是| S2
S4 -->|否| S5["生成图片 x₀"]
end
Training -->|"共享同一个网络"| Sampling
style Training fill:#e6f3ff
style Sampling fill:#fff5e6
style S5 fill:#ccffcc
最后一句话:Diffusion扩散模型通过"先加噪后去噪"的学习范式,让神经网络学会了从任意噪声level中恢复原始数据的能力,从而实现了高质量、可控的生成任务。